
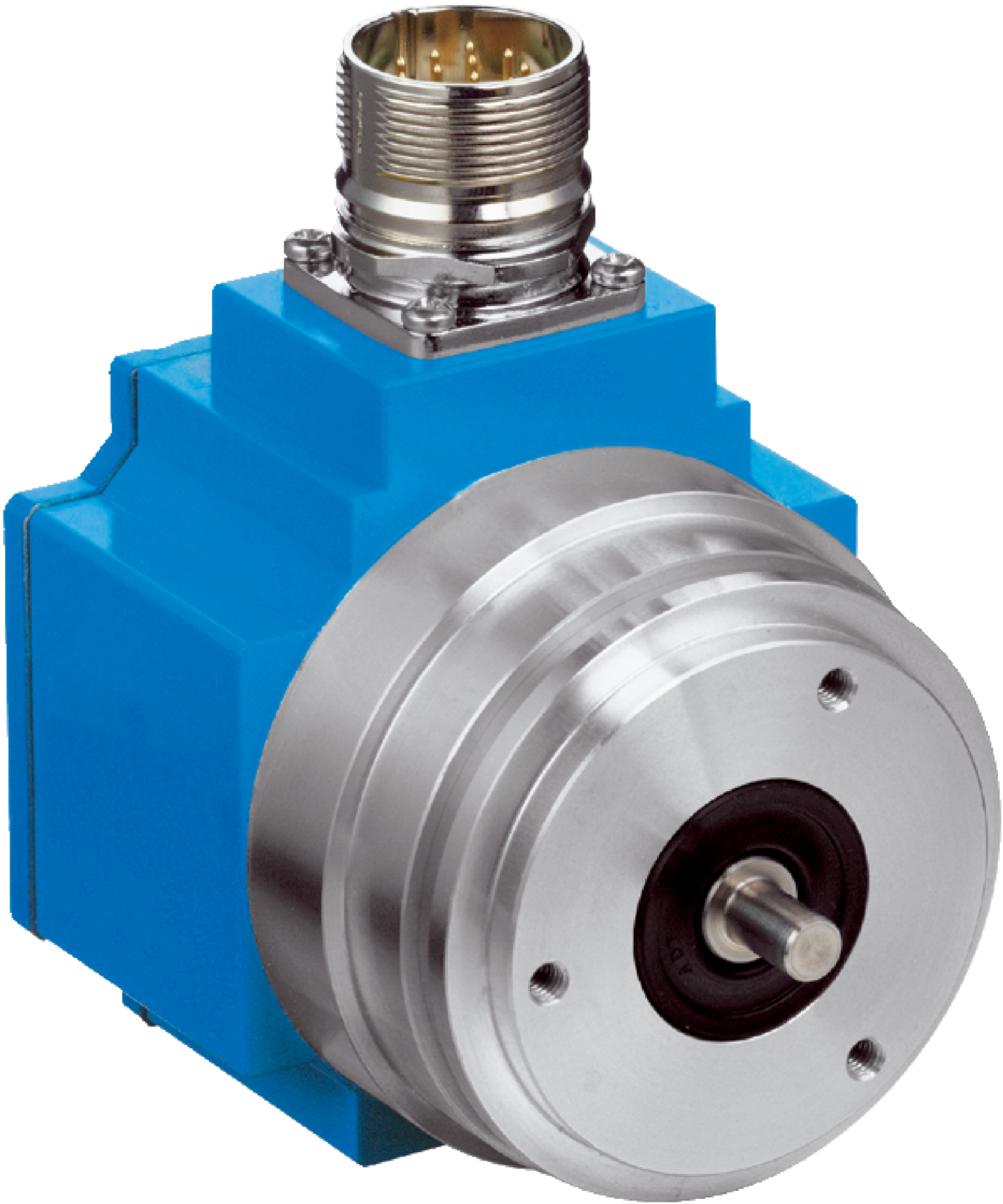
商品名称: Sick 西克EKS36-2KF0B018A伺服反馈编码器
商品型号: EKS36-2KF0B018A
品牌名: Sick 西克
分类: 运动控制传感器
订货号: 1084231
类型: 绝对值编码器
|
| 初始化时间 |
Max. 500 ms 1) |
| 上电时间/斜坡电压 |
最大 180 ms 1) |
| 电流消耗 |
≤ 150 mA (参见消耗电流图表) 2) |
| 安全完整性等级 |
SIL 2 (IEC 61508), SILCL2 (EN 62061) 1) |
| 与安全相关的分辨率 |
通道 1 = 18 位或 20 位,通道 2 = 9 位 |
| 信号噪声 (σ) |
± 5 ″ (参见图“信号噪音”和“衰减”) |
| 工作转速 |
≤ 12,000 min⁻¹ |
| PFH(每小时危险失效率) |
4 x 10-8 2) |
| 可测量绝对圈数 |
1 |
| 抗冲击能力 |
100 g, 6 ms (根据 EN 60068-2-27) |
| 电磁兼容性 |
根据 EN 61000-6-2 和 EN 61000-6-4 和 IEC61326-3 标准 3) |
| 类别 |
3 (EN ISO 13849) |
| 供货范围 |
用于定子联轴器的 M3 安装螺钉不属于随附配件。 |
| 外壳防护等级 |
IP40, 插上插头且合上罩壳时 (IEC 60529-1) 4) |
| 最大要求速率 |
216 µs |
| 编码方向 |
轴旋转时上升。从“A”方向顺时针观察 (参见尺寸图) |
| 重量 |
0.1 kg |
| 储存温度范围 |
–40 °C ... +125 °C 2) |
| 抗振动能力的频率范围 |
50 g, 10 Hz ... 2,000 Hz (EN 60068-2-6) |
| 启动转矩 |
0.3 Ncm |
| 允许静态轴位移 |
± 0.1 mm, ± 0.5 mm 径向, 轴向 |
| MTTFD(平均致危失效前时间) |
500 年 (EN ISO 13849) |
| 系统准确度 |
± 120 ″ |
| 每圈测量步数 |
262,144 |
| 性能等级 |
PL d (EN ISO 13849) |
| 测量原理 |
光学 |
| 工作转矩 |
0.2 Ncm |
| 角加速度 |
≤ 500,000 rad/s² |
| 法兰类型 / 定子联轴器 |
定子联轴器 |
| 允许动态轴位移 |
± 0.05 mm 径向± 0.1 mm 轴向 |
| 可用存储空间 |
8,192 Byte |
| 连接类型 |
插头, 4 针 |
| 供电电压 |
7 V ... 12 V |
| 轴的形式 |
锥形轴 |
| 测试率 |
1 h |
| TM(持续运行时间) |
20 年 (EN ISO 13849) |
| 每圈分辨率 |
18 bit |
| 通讯接口 |
HIPERFACE DSL® |
| 外部温度电阻测量 |
32 位,无前缀 (1 Ω) 0 ... 209.600 Ω-40 °C 至 +160 °C:NTC +-2K;PTC+-3K |
| 转动惯量 |
4.5 gcm² |
| 相对空气湿度/凝结 |
90 %, 不允许凝结 |
| 尺寸 |
参见尺寸图 |
| 运行温度范围 |
–20 °C ... +115 °C 1) |
| 绝对位置编码类型 |
二进制 |
| 建议供电电压 |
8 V |
| 数字位置值的输出频率 |
0 kHz ... 75 kHz |
| 滚珠轴承使用寿命 |
3.6 x 10^9 圈 |
|
|
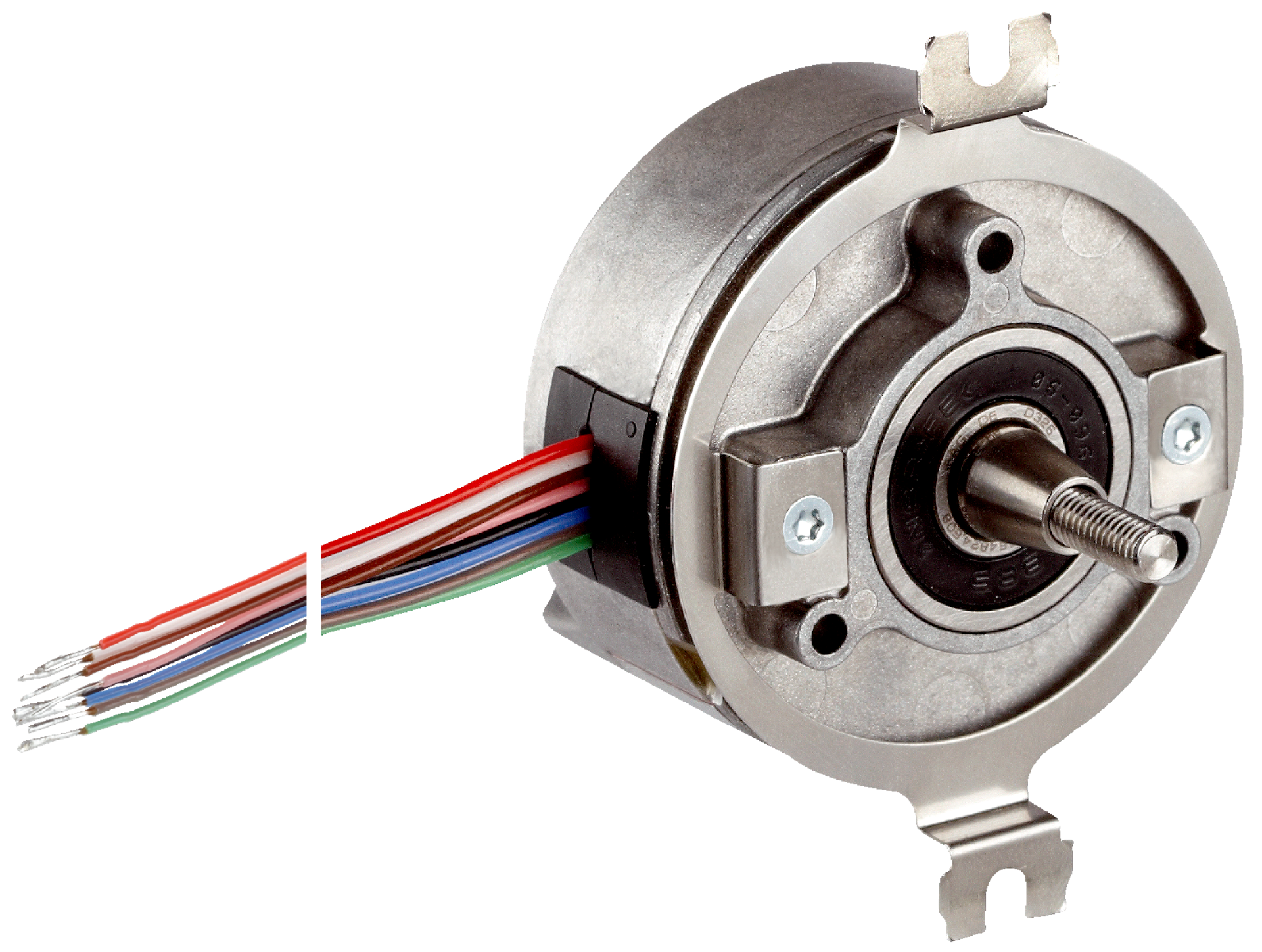
商品名称: Sick 西克EKS36-0KF0B0S01伺服反馈编码器
商品型号: EKS36-0KF0B0S01
品牌名: Sick 西克
分类: 运动控制传感器
订货号: 1084892
类型: 绝对值编码器
|
| 初始化时间 |
Max. 500 ms 1) |
| 运行温度范围 |
–20 °C ... +115 °C 1) |
| 供货范围 |
用于定子联轴器的 M3 安装螺钉不属于随附配件。 |
| 可用存储空间 |
8,192 Byte |
| 连接类型 |
插头, 4 针 |
| 上电时间/斜坡电压 |
最大 180 ms 1) |
| 尺寸 |
参见尺寸图 |
| UK declaration of conformity |
✔ |
| 绝对位置编码类型 |
二进制 |
| 每圈分辨率 |
18 bit |
| 系统准确度 |
± 120 ″ |
| 基准设备 |
EKS36-0KF0B018A, 1084229 |
| 通讯接口 |
HIPERFACE DSL® |
| 供电电压 |
7 V ... 12 V |
| 每圈测量步数 |
262,144 |
| 轴的形式 |
锥形轴 |
| 角加速度 |
≤ 500,000 rad/s² |
| 特性 |
客户自定义定子联轴器 |
| 法兰类型 / 定子联轴器 |
定子联轴器 |
| 允许静态轴位移 |
± 0.1 mm, - 0.4 mm, - 0.2 mm 径向, 轴向, 轴向 |
| 滚珠轴承使用寿命 |
3.6 x 10^9 圈 |
| 信号噪声 (σ) |
± 4 ″ (参见图“信号噪音”和“衰减”) |
| 电流消耗 |
≤ 150 mA (参见消耗电流图表) 2) |
| 工作转速 |
≤ 12,000 min⁻¹ |
| 数字位置值的输出频率 |
0 kHz ... 75 kHz |
| 工作转矩 |
0.2 Ncm |
| 可测量绝对圈数 |
1 |
| 储存温度范围 |
–40 °C ... +125 °C 2) |
| 相对空气湿度/凝结 |
90 %, 不允许凝结 |
| 抗振动能力的频率范围 |
50 g, 10 Hz ... 2,000 Hz (EN 60068-2-6) |
| 外壳防护等级 |
IP40, 插上插头且合上罩壳时 (IEC 60529-1) 4) |
| China-RoHS |
✔ |
| 建议供电电压 |
8 V |
| 允许动态轴位移 |
± 0.05 mm 径向± 0.1 mm 轴向 |
| 外部温度电阻测量 |
32 位,无前缀 (1 Ω) 0 ... 209.600 Ω-40 °C 至 +160 °C:NTC +-2K;PTC+-3K |
| 重量 |
0.1 kg |
| 电磁兼容性 |
根据 EN 61000-6-2 和 EN 61000-6-4 和 IEC61326-3 标准 3) |
| EU declaration of conformity |
✔ |
| 特殊产品 |
✔ |
| 测量原理 |
光学 |
| 编码方向 |
轴旋转时上升。从“A”方向顺时针观察 (参见尺寸图) |
| 转动惯量 |
4.5 gcm² |
| ACMA declaration of conformity |
✔ |
| MTTFD(平均致危失效前时间) |
155 年 (EN ISO 13849) 1) |
| 抗冲击能力 |
100 g, 6 ms (根据 EN 60068-2-27) |
| 启动转矩 |
0.3 Ncm |
|

商品名称: Sick 西克SRM50-HZA0-S34伺服反馈编码器
商品型号: SRM50-HZA0-S34
品牌名: Sick 西克
分类: 运动控制传感器
订货号: 1059340
类型: 增量式编码器
|
| 尺寸 |
参见尺寸图 |
| 差分非线性度 |
± 7 ″, 正弦/余弦信号周期非线性 |
| 工作转矩 |
0.2 Ncm |
| 滚珠轴承使用寿命 |
3.6 x 109 转 |
| 供电电压 |
7 V DC ... 12 V DC |
| 角加速度 |
≤ 200,000 rad/s² |
| 允许径向轴位移 |
± 0.6 mm |
| 电磁兼容性 |
根据 EN 61000-6-2 和 EN 61000-6-3 1) |
| 特性 |
定制化盲孔空心轴 Ø 12.7 x 14 mm |
| 垂直于旋转轴的静态角位移 |
± 0.005 mm/mm |
| 供货范围 |
定子联轴器或伺服钳的安装螺钉不属于随附配件。 |
| 每圈正弦/余弦周期 |
1,024 |
| 测量步距 |
0.3 ″ 正弦/余弦信号按 12 位细分 |
| 连接类型 |
插头, 8 针, 径向 |
| 运行温度范围 |
–30 °C ... +115 °C |
| 允许动态轴位移 |
± 0.1 mm 径向± 0.2 mm 轴向 |
| 转动惯量 |
10 gcm² |
| 建议供电电压 |
8 V DC |
| 垂直于旋转轴的动态角位移 |
± 0.0025 mm/mm |
| 重量 |
≤ 0.2 kg |
| 基准设备 |
SRM50-HFA0-K22, 1037072 |
| 积分非线性 |
Typ. ± 45 ″, 估算正弦/余弦信号的误差限值, 定子联轴器松动 |
| 通讯接口 |
HIPERFACE® |
| 电流消耗 |
80 mA 1) |
| 储存温度范围 |
–40 °C ... +125 °C, 无包装 |
| 可测量绝对圈数 |
4,096 |
| 工作转速 |
≤ 12,000 min⁻¹ |
| 外壳防护等级 |
IP40, 插上配套插头 (IEC 60529) |
| 特殊产品 |
✔ |
| 总步数 |
134,217,728 |
| 绝对位置编码类型 |
二进制 |
| 法兰类型 / 定子联轴器 |
弹簧片支撑, 弹簧片支撑 |
| 启动转矩 |
+ 0.4 Ncm |
| 正弦/余弦周期输出频率 |
≤ 200 kHz |
| 系统准确度 |
± 52 ″ |
| 可用存储空间 |
1,792 Byte |
| 编码方向 |
轴旋转时上升。从“A”方向顺时针观察 (参见尺寸图), 从“A”方向观察顺时针旋转的轴(参见尺寸图) |
| 轴的形式 |
锥形轴 |
| 允许轴向轴位移 |
± 0.95 mm |
| 相对空气湿度/凝结 |
90 %, 不允许凝结 |
| 抗冲击能力 |
100 g, 10 ms, 10 ms (根据 EN 60068-2-27) |
| 抗振动能力的频率范围 |
20 g, 10 Hz ... 2,000 Hz (EN 60068-2-6) |
| 允许静态轴位移 |
± 0.5 mm 径向± 0.75 mm 轴向 |
|
商品名称: Sick 西克SRM50-HXV0-K22伺服反馈编码器
商品型号: SRM50-HXV0-K22
品牌名: Sick 西克
分类: 运动控制传感器
订货号: 1037106
类型: 增量式编码器
|
| 供电电压 |
7 V DC ... 12 V DC |
| 储存温度范围 |
–30 °C ... +90 °C, 无包装 |
| 相对空气湿度/凝结 |
90 %, 不允许凝结 |
| 軸負荷 |
40 N (径向)20 N (轴向) |
| 可用存储空间 |
1,792 Byte |
| 启动转矩 |
+ 1.5 Ncm |
| 系统准确度 |
± 52 ″ |
| 抗振动能力的频率范围 |
20 g, 10 Hz ... 2,000 Hz (EN 60068-2-6) |
| 电磁兼容性 |
根据 EN 61000-6-2 和 EN 61000-6-3 1) |
| 正弦/余弦周期输出频率 |
≤ 200 kHz |
| MTTFD(平均致危失效前时间) |
235 年 (EN ISO 13849) 1) |
| 工作转速 |
≤ 6,000 min⁻¹ |
| 建议供电电压 |
8 V DC |
| 转动惯量 |
25 gcm² |
| 外壳防护等级 |
IP65, 插上配套插头 (IEC 60529) |
| 差分非线性度 |
± 7 ″ |
| 可测量绝对圈数 |
4,096 |
| 工作转矩 |
1 Ncm |
| 通讯接口 |
HIPERFACE® |
| 连接类型 |
电缆, 8 芯, 径向, 1.5 m |
| 电流消耗 |
80 mA 1) |
| 角加速度 |
≤ 200,000 rad/s² |
| 重量 |
≤ 0.2 kg |
| 总步数 |
134,217,728 |
| 测量步距 |
0.3 ″ 正弦/余弦信号按 12 位细分 |
| 积分非线性 |
Typ. ± 45 ″, 估算正弦/余弦信号的误差限值 |
| 绝对位置编码类型 |
二进制 |
| 滚珠轴承使用寿命 |
3.6 x 109 转 |
| 轴的形式 |
实心轴 |
| 尺寸 |
参见尺寸图 |
| 抗冲击能力 |
100 g, 10 ms, 10 ms (根据 EN 60068-2-27) |
| 轴直径 |
6 mm |
| 编码方向 |
轴旋转时上升。从“A”方向顺时针观察 (参见尺寸图), 从“A”方向观察顺时针旋转的轴(参见尺寸图) |
| 运行温度范围 |
–30 °C ... +85 °C |
| 每圈正弦/余弦周期 |
1,024 |
| 法兰类型 / 定子联轴器 |
伺服法兰, 定子联轴器 |
|
商品名称: Sick 西克SRM50-HFV0-K21伺服反馈编码器
商品型号: SRM50-HFV0-K21
品牌名: Sick 西克
分类: 运动控制传感器
订货号: 1037073
类型: 增量式编码器
|
| 供货范围 |
定子联轴器或伺服钳的安装螺钉不属于随附配件。 |
| 供电电压 |
7 V DC ... 12 V DC |
| 可测量绝对圈数 |
4,096 |
| 尺寸 |
参见尺寸图 |
| 编码方向 |
轴旋转时上升。从“A”方向顺时针观察 (参见尺寸图), 从“A”方向观察顺时针旋转的轴(参见尺寸图) |
| 轴的形式 |
锥形轴 |
| 系统准确度 |
± 52 ″ |
| 可用存储空间 |
128 Byte |
| 连接类型 |
电缆, 8 芯, 径向, 0.2 m |
| MTTFD(平均致危失效前时间) |
235 年 (EN ISO 13849) 1) |
| 电流消耗 |
80 mA 1) |
| 通讯接口 |
HIPERFACE® |
| 相对空气湿度/凝结 |
90 %, 不允许凝结 |
| 差分非线性度 |
± 7 ″ |
| 转动惯量 |
10 gcm² |
| 工作转速 |
≤ 12,000 min⁻¹ |
| 积分非线性 |
Typ. ± 45 ″, 估算正弦/余弦信号的误差限值, 定子联轴器松动 |
| 建议供电电压 |
8 V DC |
| 抗冲击能力 |
100 g, 10 ms, 10 ms (根据 EN 60068-2-27) |
| 总步数 |
134,217,728 |
| 重量 |
≤ 0.2 kg |
| 绝对位置编码类型 |
二进制 |
| 抗振动能力的频率范围 |
20 g, 10 Hz ... 2,000 Hz (EN 60068-2-6) |
| 测量步距 |
0.3 ″ 正弦/余弦信号按 12 位细分 |
| 允许静态轴位移 |
± 0.5 mm 径向± 0.75 mm 轴向 |
| 正弦/余弦周期输出频率 |
≤ 200 kHz |
| 垂直于旋转轴的动态角位移 |
± 0.0025 mm/mm |
| 运行温度范围 |
–30 °C ... +115 °C |
| 法兰类型 / 定子联轴器 |
弹簧片支撑, 弹簧片支撑 |
| 工作转矩 |
0.2 Ncm |
| 允许动态轴位移 |
± 0.1 mm 径向± 0.2 mm 轴向 |
| 滚珠轴承使用寿命 |
3.6 x 109 转 |
| 角加速度 |
≤ 200,000 rad/s² |
| 储存温度范围 |
–40 °C ... +125 °C, 无包装 |
| 外壳防护等级 |
IP40, 插上配套插头 (IEC 60529) |
| 每圈正弦/余弦周期 |
1,024 |
| 垂直于旋转轴的静态角位移 |
± 0.005 mm/mm |
| 电磁兼容性 |
根据 EN 61000-6-2 和 EN 61000-6-3 1) |
| 启动转矩 |
+ 0.4 Ncm |
|

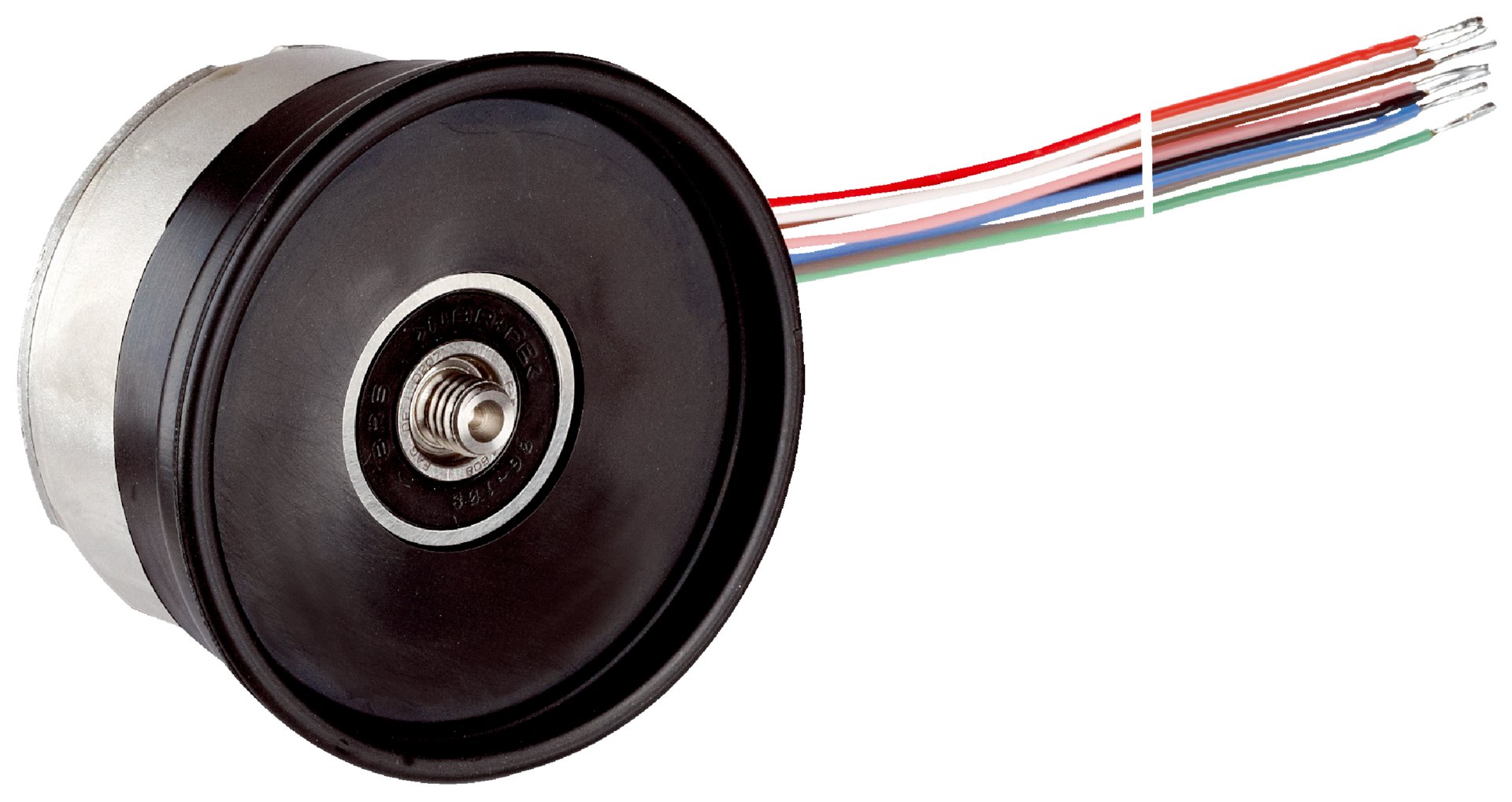
商品名称: Sick 西克SEM70-HN025AK22伺服反馈编码器
商品型号: SEM70-HN025AK22
品牌名: Sick 西克
分类: 其他
订货号: 1074669
类型: 其他
|
| 连接类型 |
插头, 8 针 |
| 可测量绝对圈数 |
4,096 |
| 通讯接口 |
HIPERFACE® |
| 供货范围 |
用于编码器外壳的 M3 安装螺钉不属于随附配件。 |
| MTTFD(平均致危失效前时间) |
155 年 (EN ISO 13849) 1) |
| 可用存储空间 |
2,048 Byte |
| 编码方向 |
增量, 从“A”方向观察顺时针旋转的轴(参见尺寸图) |
| 系统准确度 |
± 155 ″ |
| 抗冲击能力 |
100 g, 10 ms (根据 EN 60068-2-27) 2) |
| 电磁兼容性 |
根据 EN 61000-6-2 和 EN 61000-6-4 标准(级别 A) 3) |
| 尺寸 |
参见尺寸图 |
| 允许径向轴位移 |
± 0.15 mm |
| 相对空气湿度/凝结 |
85 %, 不允许凝结 1) |
| 供电电压 |
7 V DC ... 12 V DC |
| 储存温度范围 |
–40 °C ... +125 °C, 无包装 |
| 外壳防护等级 |
IP40, 插上插头且合上罩壳时 (IEC 60529) |
| 每圈正弦/余弦周期 |
32 |
| 总步数 |
4,194,304 |
| 绝对位置编码类型 |
二进制 |
| 建议供电电压 |
11 V DC |
| 延迟 |
25 µs |
| 电流消耗 |
≤ 150 mA 2) |
| 允许动态轴位移 |
± 0.1 mm |
| 重量 |
≤ 0.13 kg |
| 允许轴向轴位移 |
± 0.4 mm |
| 上电时间/斜坡电压 |
最大 180 ms 1) |
| 允许静态轴位移 |
± 0.3 mm |
| 工作转速 |
8,500 min⁻¹, 直至产生可靠的绝对位置 |
| 角加速度 |
≤ 50,000 rad/s² |
| 差分非线性度 |
± 55 ″ 1) |
| 转动惯量 |
60 gcm² |
| 积分非线性 |
± 100 ″ 1) |
| 轴的形式 |
通孔空心轴 |
| 运行温度范围 |
–30 °C ... +115 °C |
| 抗振动能力的频率范围 |
50 g, 10 Hz ... 2,000 Hz (EN 60068-2-6) 1) |
| 测量步距 |
10 ″ 正弦/余弦信号按 12 位细分 |
|
商品名称: Sick 西克SRM50-HAV0-K21伺服反馈编码器
商品型号: SRM50-HAV0-K21
品牌名: Sick 西克
分类: 运动控制传感器
订货号: 1037065
类型: 增量式编码器
|
| 重量 |
≤ 0.2 kg |
| 转动惯量 |
10 gcm² |
| 抗冲击能力 |
100 g, 10 ms, 10 ms (根据 EN 60068-2-27) |
| 垂直于旋转轴的动态角位移 |
± 0.0025 mm/mm |
| 可测量绝对圈数 |
4,096 |
| 电磁兼容性 |
根据 EN 61000-6-2 和 EN 61000-6-3 1) |
| 滚珠轴承使用寿命 |
3.6 x 109 转 |
| MTTFD(平均致危失效前时间) |
235 年 (EN ISO 13849) 1) |
| 供电电压 |
7 V DC ... 12 V DC |
| 运行温度范围 |
–30 °C ... +115 °C |
| 建议供电电压 |
8 V DC |
| 法兰类型 / 定子联轴器 |
橡胶支撑, 橡胶支撑 |
| 正弦/余弦周期输出频率 |
≤ 200 kHz |
| 角加速度 |
≤ 200,000 rad/s² |
| 相对空气湿度/凝结 |
90 %, 不允许凝结 |
| 外壳防护等级 |
IP40, 插上配套插头 (IEC 60529) |
| 总步数 |
134,217,728 |
| 允许动态轴位移 |
± 0.1 mm 径向± 0.2 mm 轴向 |
| 垂直于旋转轴的静态角位移 |
± 0.005 mm/mm |
| 系统准确度 |
± 52 ″ |
| 尺寸 |
参见尺寸图 |
| 抗振动能力的频率范围 |
20 g, 10 Hz ... 2,000 Hz (EN 60068-2-6) |
| 每圈正弦/余弦周期 |
1,024 |
| 差分非线性度 |
± 7 ″ |
| 工作转矩 |
0.2 Ncm |
| 供货范围 |
定子联轴器或伺服钳的安装螺钉不属于随附配件。 |
| 启动转矩 |
+ 0.4 Ncm |
| 编码方向 |
轴旋转时上升。从“A”方向顺时针观察 (参见尺寸图), 从“A”方向观察顺时针旋转的轴(参见尺寸图) |
| 通讯接口 |
HIPERFACE® |
| 测量步距 |
0.3 ″ 正弦/余弦信号按 12 位细分 |
| 工作转速 |
≤ 12,000 min⁻¹ |
| 积分非线性 |
Typ. ± 45 ″, 估算正弦/余弦信号的误差限值, 定子联轴器松动 |
| 连接类型 |
电缆, 8 芯, 径向, 0.2 m |
| 电流消耗 |
80 mA 1) |
| 轴的形式 |
插入式转轴 |
| 可用存储空间 |
128 Byte |
| 储存温度范围 |
–40 °C ... +125 °C, 无包装 |
| 绝对位置编码类型 |
二进制 |
| 允许静态轴位移 |
± 0.5 mm 径向± 0.75 mm 轴向 |
|
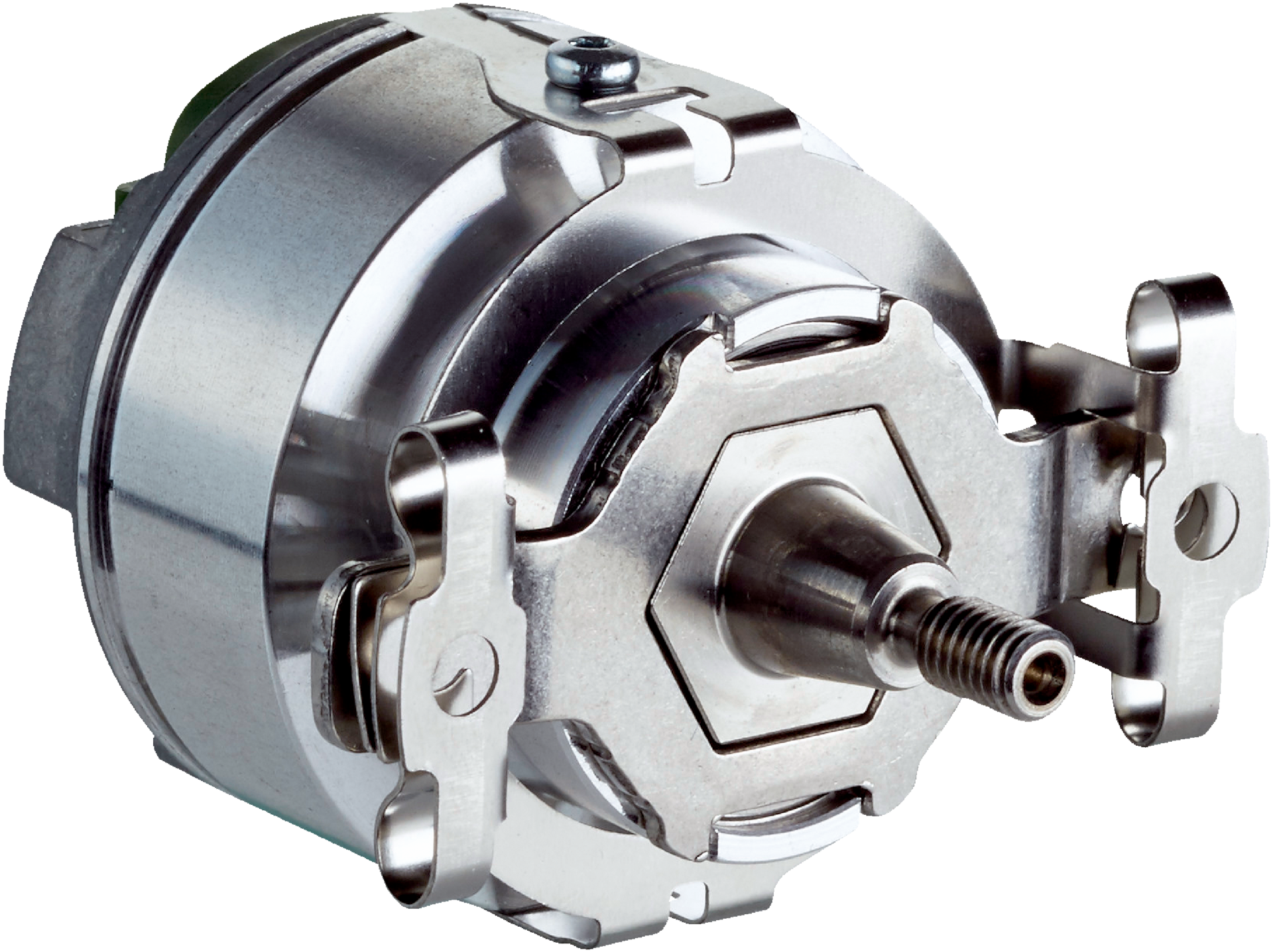
商品名称: Sick 西克SKS36-HFA00S09伺服反馈编码器
商品型号: SKS36-HFA00S09
品牌名: Sick 西克
分类: 运动控制传感器
订货号: 1077421
类型: 增量式编码器
|
| 抗振动能力的频率范围 |
30 g, 10 Hz ... 2,000 Hz (EN 60068-2-6) |
| 建议供电电压 |
8 V DC |
| 可测量绝对圈数 |
1 |
| 电磁兼容性 |
根据 EN 61000-6-2 和 EN 61000-6-3 1) |
| 差分非线性度 |
± 40 ″, 正弦/余弦信号周期非线性 |
| MTTFD(平均致危失效前时间) |
210 年 (EN ISO 13849) 1) |
| 系统准确度 |
± 120 ″ |
| 电流消耗 |
60 mA 1) |
| 积分非线性 |
± 80 ″, 估算正弦/余弦信号的误差限值 |
| 绝对位置编码类型 |
二进制 |
| 供货范围 |
用于定子联轴器的 M3 安装螺钉不属于随附配件。 |
| 角加速度 |
≤ 500,000 rad/s² |
| 抗冲击能力 |
100 g, 6 ms, 6 ms (根据 EN 60068-2-27) |
| 外壳防护等级 |
IP50, 插上插头且合上罩壳时 (IEC 60529) |
| 工作转矩 |
0.2 Ncm |
| 轴的形式 |
锥形轴 |
| 储存温度范围 |
–40 °C ... +125 °C, 无包装 |
| 特性 |
陶瓷滚珠轴承 1) |
| 通讯接口 |
HIPERFACE® |
| 特殊产品 |
✔ |
| 测量步距 |
2.5 ″ 正弦/余弦信号按 12 位细分 |
| 法兰类型 / 定子联轴器 |
弹簧片支撑 |
| 启动转矩 |
+ 0.3 Ncm |
| 编码方向 |
轴旋转时上升。从“A”方向顺时针观察 (参见尺寸图), 从“A”方向观察顺时针旋转的轴(参见尺寸图) |
| 尺寸 |
参见尺寸图 |
| 重量 |
≤ 0.07 kg |
| 允许动态轴位移 |
± 0.05 mm 径向± 0.1 mm 轴向 |
| 运行温度范围 |
–20 °C ... +110 °C |
| 相对空气湿度/凝结 |
90 %, 不允许凝结 |
| 允许静态轴位移 |
± 0.1 mm, - 0.4 mm, + 0.2 mm 径向, 轴向, 轴向 |
| 可用存储空间 |
1,792 Byte |
| 供电电压 |
7 V DC ... 12 V DC |
| 滚珠轴承使用寿命 |
3.6 x 109 转 |
| 正弦/余弦周期输出频率 |
≤ 65 kHz |
| 连接类型 |
插头, 8 针, 径向 |
| 转动惯量 |
4.5 gcm² |
| 工作转速 |
12,000 U/min |
| 每圈正弦/余弦周期 |
128 |
| 总步数 |
4,096 |
|
|
商品名称: Sick 西克SRS50-HFZ0-S42伺服反馈编码器
商品型号: SRS50-HFZ0-S42
品牌名: Sick 西克
分类: 运动控制传感器
订货号: 1082407
类型: 增量式编码器
|
| 抗冲击能力 |
100 g, 10 ms, 10 ms (根据 EN 60068-2-27) |
| 供电电压 |
7 V DC ... 12 V DC |
| 角加速度 |
≤ 200,000 rad/s² |
| 储存温度范围 |
–40 °C ... +125 °C, 无包装 |
| 连接类型 |
绞合线, 2.5 m |
| 系统准确度 |
± 52 ″ |
| 供货范围 |
定子联轴器或伺服钳的安装螺钉不属于随附配件。 |
| 可用存储空间 |
128 Byte |
| 通讯接口 |
HIPERFACE® |
| 可测量绝对圈数 |
1 |
| 编码方向 |
轴旋转时上升。从“A”方向顺时针观察 (参见尺寸图), 从“A”方向观察顺时针旋转的轴(参见尺寸图) |
| 允许静态轴位移 |
± 0.5 mm 径向± 0.75 mm 轴向 |
| 建议供电电压 |
8 V DC |
| 转动惯量 |
10 gcm² |
| 工作转速 |
≤ 12,000 min⁻¹ |
| 特殊产品 |
✔ |
| 差分非线性度 |
± 7 ″, 正弦/余弦信号周期非线性 |
| 启动转矩 |
+ 0.4 Ncm |
| 电流消耗 |
80 mA 1) |
| 积分非线性 |
Typ. ± 45 ″, 估算正弦/余弦信号的误差限值, 定子联轴器松动 |
| 垂直于旋转轴的静态角位移 |
± 0.005 mm/mm |
| 重量 |
≤ 0.2 kg |
| 运行温度范围 |
–30 °C ... +115 °C |
| 电磁兼容性 |
根据 EN 61000-6-2 和 EN 61000-6-3 1) |
| 外壳防护等级 |
IP40, 插上配套插头 (IEC 60529) |
| 每圈正弦/余弦周期 |
1,024 |
| 测量步距 |
0.3 ″ 正弦/余弦信号按 12 位细分 |
| 绝对位置编码类型 |
二进制 |
| 工作转矩 |
0.2 Ncm |
| 轴的形式 |
锥形轴 |
| 基准设备 |
SRS50-HFV0-K21, 1037069 |
| 法兰类型 / 定子联轴器 |
弹簧片支撑, 弹簧片支撑 |
| 滚珠轴承使用寿命 |
3.6 x 109 转 |
| 正弦/余弦周期输出频率 |
≤ 200 kHz |
| 尺寸 |
参见尺寸图 |
| 相对空气湿度/凝结 |
90 %, 不允许凝结 |
| 抗振动能力的频率范围 |
20 g, 10 Hz ... 2,000 Hz (EN 60068-2-6) |
| 总步数 |
32,768 |
| 允许动态轴位移 |
± 0.1 mm 径向± 0.2 mm 轴向 |
| 垂直于旋转轴的动态角位移 |
± 0.0025 mm/mm |
|
商品名称: Sick 西克SRM50-HEA0-K21伺服反馈编码器
商品型号: SRM50-HEA0-K21
品牌名: Sick 西克
分类: 运动控制传感器
订货号: 1037087
类型: 增量式编码器
|
| 重量 |
≤ 0.2 kg |
| 供电电压 |
7 V DC ... 12 V DC |
| 工作转速 |
≤ 12,000 min⁻¹ |
| 每圈正弦/余弦周期 |
1,024 |
| 垂直于旋转轴的静态角位移 |
± 0.005 mm/mm |
| MTTFD(平均致危失效前时间) |
235 年 (EN ISO 13849) 1) |
| 系统准确度 |
± 52 ″ |
| 可用存储空间 |
128 Byte |
| 通讯接口 |
HIPERFACE® |
| 抗振动能力的频率范围 |
20 g, 10 Hz ... 2,000 Hz (EN 60068-2-6) |
| 外壳防护等级 |
IP40, 插上配套插头 (IEC 60529) |
| 工作转矩 |
0.2 Ncm |
| 允许静态轴位移 |
± 0.3 mm 径向± 0.75 mm 轴向 |
| 编码方向 |
轴旋转时上升。从“A”方向顺时针观察 (参见尺寸图), 从“A”方向观察顺时针旋转的轴(参见尺寸图) |
| 转动惯量 |
10 gcm² |
| 运行温度范围 |
–30 °C ... +115 °C |
| 建议供电电压 |
8 V DC |
| 可测量绝对圈数 |
4,096 |
| 抗冲击能力 |
100 g, 10 ms, 10 ms (根据 EN 60068-2-27) |
| 正弦/余弦周期输出频率 |
≤ 200 kHz |
| 垂直于旋转轴的动态角位移 |
± 0.0025 mm/mm |
| 供货范围 |
定子联轴器或伺服钳的安装螺钉不属于随附配件。 |
| 电流消耗 |
80 mA 1) |
| 相对空气湿度/凝结 |
90 %, 不允许凝结 |
| 绝对位置编码类型 |
二进制 |
| 法兰类型 / 定子联轴器 |
橡胶支撑, 橡胶支撑 |
| 角加速度 |
≤ 200,000 rad/s² |
| 总步数 |
134,217,728 |
| 尺寸 |
参见尺寸图 |
| 储存温度范围 |
–40 °C ... +125 °C, 无包装 |
| 允许动态轴位移 |
± 0.1 mm 径向± 0.2 mm 轴向 |
| 轴的形式 |
锥形轴 |
| 差分非线性度 |
± 7 ″ |
| 启动转矩 |
+ 0.4 Ncm |
| 滚珠轴承使用寿命 |
3.6 x 109 转 |
| 连接类型 |
插头, 8 针, 径向 |
| 电磁兼容性 |
根据 EN 61000-6-2 和 EN 61000-6-3 1) |
| 测量步距 |
0.3 ″ 正弦/余弦信号按 12 位细分 |
| 积分非线性 |
Typ. ± 45 ″, 估算正弦/余弦信号的误差限值, 定子联轴器松动 |
|



